Umělá inteligence tvaruje autonomní podvodní „klouzavé roboty“
Sdílet na sociálních sítích:
Vědci z MIT využili AI k návrhu hydrodynamických podvodních robotů pro sběr mořských dat. Nové tvary umožňují efektivnější pohyb.
Mořští vědci se dlouhodobě podivují nad tím, jak efektivně plavou zvířata jako ryby a tuleni, přestože mají různé tvary. Jejich těla jsou optimalizována pro efektivní hydrodynamickou vodní navigaci, takže mohou vynakládat minimální energii při cestování na dlouhé vzdálenosti.
Autonomní vozidla se mohou podobně vznášet oceánem a shromažďovat data o rozsáhlých podvodních prostředích. Tvary těchto klouzavých strojů jsou však méně rozmanité než to, co najdeme u mořského života – běžné návrhy často připomínají trubky nebo torpéda, protože jsou také poměrně hydrodynamické. Navíc testování nových konstrukcí vyžaduje mnoho pokusů a omylů v reálném světě.
Výzkumníci z MIT Computer Science and Artificial Intelligence Laboratory (CSAIL) a University of Wisconsin at Madison navrhují, že umělá inteligence by nám mohla pomoci pohodlněji prozkoumat nezmapované návrhy kluzáků. Jejich metoda využívá strojové učení k testování různých 3D návrhů ve fyzikálním simulátoru a poté je tvaruje do hydrodynamicky lepších tvarů. Výsledný model lze vyrobit pomocí 3D tiskárny, a to s výrazně nižší spotřebou energie než u ručně vyráběných modelů.
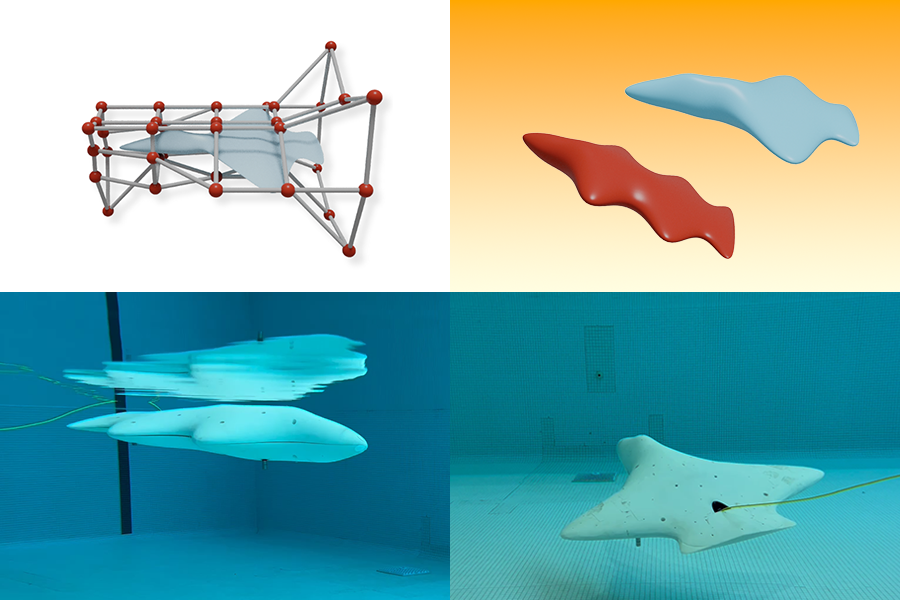
Vědci z MIT tvrdí, že tento návrhový proces by mohl vytvořit nové, efektivnější stroje, které pomohou oceánografům měřit teplotu a slanost vody, shromažďovat podrobnější informace o proudech a sledovat dopady klimatických změn. Tým tento potenciál prokázal vytvořením dvou kluzáků o velikosti přibližně boogie boardu: dvouplošného stroje připomínajícího letadlo a unikátního čtyřkřídlého objektu připomínajícího plochou rybu se čtyřmi ploutvemi.
Peter Yichen Chen, postdoktorand MIT CSAIL a vedoucí výzkumník projektu, poznamenává, že tyto návrhy jsou jen některé z nových tvarů, které může přístup jeho týmu generovat. „Vyvinuli jsme poloautomatický proces, který nám může pomoci testovat nekonvenční návrhy, jejichž navrhování by pro lidi bylo velmi náročné,“ říká. „Tato úroveň rozmanitosti tvarů nebyla dříve zkoumána, takže většina z těchto návrhů nebyla testována v reálném světě.“
Ale jak AI přišla na tyto nápady? Nejprve výzkumníci našli 3D modely více než 20 konvenčních tvarů pro průzkum moří, jako jsou ponorky, velryby, manta paprsky a žraloci. Poté tyto modely uzavřeli do „deformačních klecí“, které mapují různé body artikulace, které výzkumníci posouvali, aby vytvořili nové tvary.
Tým vedený CSAIL vytvořil datovou sadu konvenčních a deformovaných tvarů, než simuloval, jak by fungovaly v různých „úhlech náběhu“ – směr, kterým se plavidlo nakloní, když klouže ve vodě. Například plavec se může chtít ponořit pod úhlem -30 stupňů, aby vyzvedl předmět z bazénu.
Tyto rozmanité tvary a úhly náběhu byly poté použity jako vstupy pro neuronovou síť, která v podstatě předvídá, jak efektivně bude tvar kluzáku fungovat při určitých úhlech a optimalizuje ho podle potřeby.
Zlepšení klouzavých robotů
Neuronová síť týmu simuluje, jak by se konkrétní kluzák choval v souladu s podvodní fyzikou, s cílem zachytit, jak se pohybuje vpřed a jaká síla ho brzdí. Cíl: najít nejlepší poměr vztlaku k odporu, který představuje, kolik je kluzák držen vzhůru ve srovnání s tím, kolik je brzděn. Čím vyšší je poměr, tím efektivněji vozidlo putuje; čím nižší je, tím více se kluzák během své plavby zpomalí.
Poměry vztlaku k odporu jsou klíčové pro létající letadla: Při vzletu chcete maximalizovat vztlak, abyste zajistili, že bude dobře klouzat proti větrným proudům, a při přistání potřebujete dostatečnou sílu k jeho zbrzdění.
Niklas Hagemann, postgraduální student architektury na MIT a přidružený člen CSAIL, poznamenává, že tento poměr je stejně užitečný, pokud chcete podobný klouzavý pohyb v oceánu.
„Náš proces upravuje tvary kluzáků, aby našel nejlepší poměr vztlaku k odporu, čímž optimalizuje jeho výkon pod vodou,“ říká Hagemann, který je také spoluautorem článku, který byl prezentován na Mezinárodní konferenci o robotice a automatizaci v červnu. „Poté můžete exportovat nejlépe fungující návrhy, takže je lze tisknout na 3D tiskárně.“
Rychlé klouzání
Ačkoli se jejich proces AI zdál realistický, výzkumníci museli zajistit, aby jeho předpovědi o výkonu kluzáku byly přesné, a to experimentováním v realistických prostředích.
Nejprve vyrobili svůj dvouplošný design jako zmenšené vozidlo připomínající papírové letadlo. Tento kluzák byl přenesen do větrného tunelu Wright Brothers na MIT, což je vnitřní prostor s ventilátory, které simulují proudění vzduchu. Kluzák umístěný v různých úhlech měl předpovězený poměr vztlaku k odporu v průměru pouze o 5 % vyšší než poměry zaznamenané v větrných experimentech – což je malý rozdíl mezi simulací a realitou.
Digitální vyhodnocení zahrnující vizuální, komplexnější fyzikální simulátor také potvrdilo, že proces AI provedl poměrně přesné předpovědi o tom, jak se kluzáky budou pohybovat. Vizualizoval, jak by se tyto stroje potápěly ve 3D.
Aby však tým skutečně vyhodnotil tyto kluzáky v reálném světě, musel vidět, jak si jeho zařízení povede pod vodou. Pro tento test vytiskl dva návrhy, které nejlépe fungovaly v konkrétních bodech náběhu: tryskový přístroj při 9 stupních a čtyřkřídlý stroj při 30 stupních.
Oba tvary byly vyrobeny na 3D tiskárně jako duté skořápky s malými otvory, které se při úplném ponoření zaplní. Tato lehká konstrukce usnadňuje manipulaci s vozidlem mimo vodu a vyžaduje méně materiálu pro výrobu. Výzkumníci umístili uvnitř těchto skořápek trubicové zařízení, které obsahovalo celou řadu hardwaru, včetně čerpadla pro změnu vztlaku kluzáku, posunovače hmoty (zařízení, které řídí úhel náběhu stroje) a elektronických součástí.
Oba návrhy překonaly ručně vyrobený kluzák tvaru torpéda tím, že se pohybovaly efektivněji přes bazén. S vyššími poměry vztlaku k odporu než jejich protějšek oba stroje poháněné AI vynakládaly méně energie, podobně jako nenáročný způsob, jakým se vodní živočichové pohybují v oceánech.
Projekt je sice povzbudivým krokem vpřed v oblasti návrhu kluzáků, výzkumníci se však snaží zúžit mezeru mezi simulací a reálným výkonem. Doufají také, že vyvinou stroje, které dokáží reagovat na náhlé změny proudů, čímž se kluzáky stanou lépe přizpůsobivějšími mořím a oceánům.
Chen dodává, že tým se chce zaměřit na nové typy tvarů, zejména tenčí návrhy kluzáků. Zamýšlejí zrychlit svůj rámec, snad ho posílí novými funkcemi, které umožní větší přizpůsobení, manévrovatelnost, nebo dokonce vytvoření miniaturních vozidel.
Chen a Hagemann vedli výzkum tohoto projektu společně s výzkumníkem OpenAI Pingchuanem Ma SM '23, PhD '25. Článek napsali s Wei Wang, asistentem profesora na University of Wisconsin at Madison a nedávným postdoktorandem CSAIL; Johnem Romanishinem '12, SM '18, PhD '23; a dvěma profesory MIT a členy CSAIL: ředitelkou laboratoře Danielou Rus a hlavním autorem Wojciechem Matusikem. Jejich práce byla částečně podpořena grantem agentury Defense Advanced Research Projects Agency (DARPA) a programem MIT-GIST.
Související články
Autonomní humanoidní roboti debutovali na fotbalovém turnaji v Číně
Spolupráce s přírodní silou: Zkrocení lávy na Islandu
Jak jsem se málem stal obětí podvodu s pozvánkou do kalendáře Microsoft 365
Sdílet na sociálních sítích:
Komentáře